微型SAR通常搭载于小型无人机(UAV)、低空飞行器等平台,受限于载体体积、重量与功耗(SWaP)约束,单一导航传感器难以满足复杂环境下的定位需求——IMU(惯性测量单元)虽能高频输出姿态与运动数据,却存在累积误差;GPS(全球定位系统)虽能提供绝对位置参考,却易受遮挡、多径效应影响导致信号中断或精度骤降。本文将从技术原理、融合方法、实现流程、应用挑战与优化方向五个维度,深度解析IMU/GPS融合技术在
微型SAR飞行服务中的核心价值与实践要点。
一、技术背景:为何微型SAR飞行服务必须依赖IMU/GPS融合?
微型SAR的核心任务是通过雷达信号合成“虚拟孔径”,获取地面目标的高分辨率成像数据,其成像精度与载体的位置误差、姿态抖动(如滚转、俯仰、偏航)、速度稳定性直接相关:若载体定位误差超过雷达波长的1/4,将导致成像模糊;若姿态抖动频率过高,会引发雷达相位误差,进一步破坏成像质量。
单一传感器在微型SAR场景下的局限性十分显著,这也凸显了融合技术的必要性:
1. IMU的优势与短板
(1)优势:IMU由加速度计、陀螺仪、磁力计(部分型号)组成,可通过惯性原理实时测量载体的角速率(陀螺仪)、线加速度(加速度计),采样频率极高(通常100Hz~1kHz),且不依赖外部信号,在GPS信号失效时(如隧道、高楼遮挡)仍能持续输出数据,满足微型SAR对“连续运动感知”的需求。
(2)短板:IMU存在累积误差——陀螺仪的零偏漂移(长期静置时输出非零角速率)、加速度计的温度漂移(温度变化导致测量偏差)会随时间不断叠加,通常10分钟内位置误差可达数十米,远超微型SAR成像的厘米级精度要求,无法单独作为长期导航依据。
2. GPS的优势与短板
(1)优势:GPS通过接收卫星信号计算载体的绝对位置(经纬度、海拔)、速度与时间(PVT)信息,长期精度稳定(民用级约1~10米,差分GPS(DGPS)可达厘米级),无累积误差,可作为IMU误差修正的“绝对参考基准”。
(2)短板:GPS的采样频率较低(通常1Hz~10Hz),无法捕捉微型SAR载体的高频运动(如无人机突发阵风导致的姿态变化);且易受环境干扰——城市高楼会导致“多径效应”(信号经建筑物反射后被接收,引发位置偏差),森林、峡谷会遮挡卫星信号,导致数据中断(即“GPS失锁”),此时无法输出有效定位信息。
3. 融合技术的核心价值
IMU/GPS融合技术通过“高频补盲、低频修正”的协同逻辑,完美解决单一传感器的缺陷:
(1)用IMU弥补GPS的高频响应不足:当GPS采样间隔内(如100ms)载体发生高频运动时,IMU的高频数据可插值补充运动细节,避免定位“跳变”;
(2)用GPS弥补IMU的累积误差:当GPS信号有效时,以GPS的绝对位置、速度数据为基准,实时修正IMU的漂移误差,将IMU的长期误差控制在厘米级;
(3)保障复杂场景下的连续性:当GPS失锁时,依赖IMU的短期高精度数据维持定位输出,直至GPS信号恢复,避免微型SAR因定位中断导致成像失败或飞行失控。
二、IMU/GPS融合的核心技术方法:从经典算法到现代优化
微型SAR飞行服务对融合技术的核心要求是“低延迟、高精度、强鲁棒性”——延迟需控制在10ms以内(避免影响雷达成像时序),定位精度需满足厘米级(民用场景)或毫米级(专业测绘场景),且能在GPS信号不稳定时保持性能稳定。目前主流的融合方法可分为“经典滤波算法”与“现代优化算法”两类,其中卡尔曼滤波(Kalman Filter)及其衍生算法是应用最广泛的技术路线。
1. 经典滤波算法:卡尔曼滤波(KF)与扩展卡尔曼滤波(EKF)
卡尔曼滤波是一种基于“线性系统状态估计”的最优滤波方法,核心思想是通过“预测-更新”循环,结合传感器的测量模型与噪声特性,输出最优的状态估计值(如位置、速度、姿态)。
(1)标准卡尔曼滤波(KF)的应用逻辑
在IMU/GPS融合中,KF的“状态向量”通常包含载体的位置(x,y,z)、速度(vx,vy,vz)、姿态角(滚转φ、俯仰θ、偏航ψ)以及IMU的漂移误差(如陀螺仪零偏bgx,bgy,bgz、加速度计零偏bax,bay,baz),共15个状态量;“测量向量”为GPS输出的位置(x_gps,y_gps,z_gps)与速度(vx_gps,vy_gps,vz_gps)。
KF的融合流程分为两步:
1)预测步:基于IMU的加速度、角速率数据,通过惯性导航方程(如欧拉角运动学方程、捷联惯性导航算法)预测下一时刻的状态向量与误差协方差矩阵;
2)更新步:当GPS数据到达时,计算GPS测量值与预测值的“残差”,结合GPS的测量噪声矩阵,通过卡尔曼增益调整预测状态,实现误差修正。
(2)扩展卡尔曼滤波(EKF)的改进:应对非线性系统
标准KF仅适用于“线性系统”,但微型SAR载体的运动(如无人机的姿态旋转)本质是非线性过程(欧拉角与角速度的关系为非线性方程),直接使用KF会导致滤波发散(误差持续增大)。
EKF通过“局部线性化”解决非线性问题:在每个采样时刻,将非线性的运动模型与测量模型在“当前状态估计值”处进行泰勒展开,忽略高阶小项,将其近似为线性模型,再应用标准KF的“预测-更新”流程。EKF是目前微型SAR飞行服务中最常用的融合算法之一,因其计算量适中(可在嵌入式平台实时运行),且能满足多数场景的精度需求。
2. 现代优化算法:无迹卡尔曼滤波(UKF)与粒子滤波(PF)
当微型SAR载体处于极端运动场景(如高速转弯、剧烈颠簸)时,EKF的“局部线性化近似”误差会显著增大,导致滤波精度下降。此时需采用更适应非线性系统的现代优化算法。
(1)无迹卡尔曼滤波(UKF):无需线性化的非线性滤波
UKF的核心思想是“无迹变换(UT)”——通过选取一组“sigma点”(覆盖状态向量的概率分布),将这些点代入非线性模型计算,再通过加权平均得到状态估计值与协方差矩阵,避免了EKF的线性化误差。
在微型SAR场景中,UKF的优势在于:
1)对强非线性运动的适应性更强,如无人机在峡谷中快速规避障碍物时,仍能保持定位精度;
2)无需推导复杂的雅可比矩阵(EKF线性化需计算雅可比矩阵,推导难度大且易出错),降低算法实现复杂度。
(2)粒子滤波(PF):基于概率采样的鲁棒滤波
PF是一种基于“蒙特卡洛采样”的非线性滤波方法,通过大量“粒子”(每个粒子代表一个可能的状态向量)模拟状态的概率分布,再根据传感器测量值对粒子进行“权重更新”与“重采样”,最终输出权重最高的粒子作为最优状态估计。
PF的最大优势是鲁棒性极强——即使在GPS信号严重受扰(如多径效应导致测量误差达数十米)或短时间失锁时,仍能通过粒子的多样性维持定位连续性。但PF的计算量远大于EKF/UKF(通常需数千个粒子),对微型SAR载体的嵌入式计算平台(如ARM Cortex-M系列)性能要求较高,目前主要用于对精度与鲁棒性要求极高的专业场景(如军事侦察、高精度测绘)。
3. 算法选择的核心依据
在
微型SAR飞行服务中,融合算法的选择需综合考虑“精度需求、计算资源、场景复杂度”三大因素,具体决策逻辑如下:
算法类型
|
适用场景
|
优势
|
劣势
|
适用平台
|
EKF
|
常规飞行(中低速、姿态变化平缓)
|
计算量小、实时性强、易实现
|
强非线性场景精度下降
|
低成本嵌入式平台(如STM32H7)
|
UKF
|
复杂运动(高速转弯、轻度颠簸)
|
非线性适应性强、精度高于EKF
|
计算量比EKF高30%~50%
|
中高性能嵌入式平台(如NVIDIA Jetson Nano)
|
PF
|
极端场景(GPS失锁、剧烈颠簸)
|
鲁棒性极强、无线性化误差
|
计算量大、实时性差
|
高性能边缘计算平台(如NVIDIA Jetson AGX)
|
三、IMU/GPS融合在微型SAR中的实现流程:从硬件到软件
微型SAR飞行服务的IMU/GPS融合系统是“硬件+软件”的协同体系,需从传感器选型、数据同步、滤波计算到误差补偿形成完整闭环,具体实现流程可分为以下五步:
1. 硬件选型:匹配微型SAR的SWaP约束
微型SAR载体(如小型无人机)对传感器的体积、重量、功耗(SWaP)要求严苛,需在“性能”与“SWaP”间平衡:
(1)IMU选型:优先选择MEMS(微机电系统)型IMU,如ADI的ADIS16488(体积12.9mm×12.9mm×10mm,重量3.9g,零偏稳定性0.1°/h)、ST的ISM330DHCX(体积3mm×3mm×0.8mm,重量0.08g,适合超微型载体);需关注“零偏稳定性”(越低越好,直接影响累积误差)、“采样频率”(需≥200Hz,匹配微型SAR的成像时序)。
(2)GPS选型:民用场景可选择支持北斗/GPS双模的模块(如Ublox NEO-7M,体积16mm×12.2mm,功耗30mA),专业场景需搭配差分GPS(DGPS)或实时动态定位(RTK)模块(如Ublox ZED-F9P,RTK精度可达1cm+1ppm,满足高精度成像需求);需关注“冷启动时间”(≤30s,确保快速进入工作状态)、“抗遮挡能力”(支持多卫星系统可提升信号稳定性)。
(3)硬件接口:IMU通常采用SPI或I2C接口(高频数据传输),GPS采用UART或CAN接口(低频数据传输),需确保接口速率匹配传感器采样频率(如SPI速率≥10MHz,避免数据传输瓶颈)。
2. 数据同步:解决IMU与GPS的时间差问题
IMU与GPS的采样频率不同(如IMU 200Hz、GPS 10Hz),且传感器内部时钟存在偏差,若直接融合不同时间戳的数据,会导致“时间异步误差”(如用t=100ms的GPS数据修正t=105ms的IMU数据,引发位置偏差)。
数据同步的核心方法是“时间戳对齐+插值补偿”:
(1)时间戳标定:在系统启动时,通过硬件触发信号(如FPGA输出同步脉冲)或软件校时(如NTP网络时间协议),将IMU与GPS的时间戳统一到同一时钟基准(如无人机的飞控系统时钟);
(2)数据插值:当GPS数据到达时(如t=100ms),需将前后相邻的IMU数据(如t=95ms、t=100ms、t=105ms)通过线性插值或样条插值,生成与GPS时间戳一致的IMU数据,确保融合时“时间同步”。
3. 误差建模:提升滤波算法的精度基础
IMU与GPS的测量误差是影响融合精度的关键因素,需在滤波算法中建立精准的误差模型,才能实现有效的误差修正:
(1)IMU误差模型:主要包括“零偏漂移”(可建模为随机游走过程,用一阶马尔可夫模型描述)、“刻度因子误差”(传感器输出与真实值的比例偏差,如加速度计刻度因子误差1%,则测量加速度比真实值大1%)、“安装误差”(IMU与载体坐标系的偏差,需通过校准消除,如通过六面校准法测量安装角);
(2)GPS误差模型:主要包括“随机噪声”(可建模为高斯白噪声,通过GPS模块手册获取噪声标准差)、“多径误差”(城市场景中显著,可通过“残差检测”识别——当GPS测量值与IMU预测值的残差超过阈值时,降低GPS的权重)、“信号失锁误差”(失锁时GPS数据无效,需切换为纯IMU模式)。
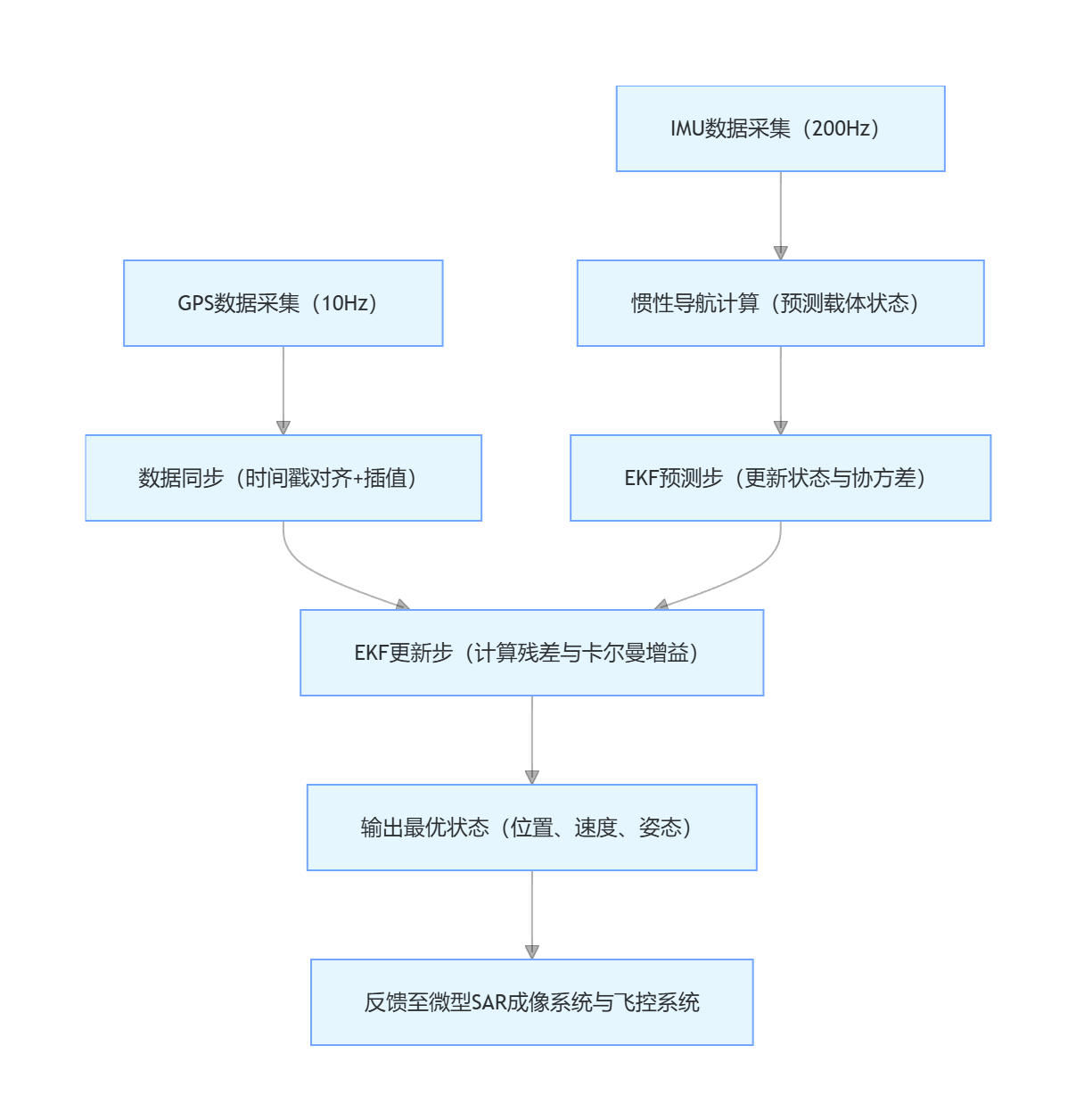
4. 滤波计算:实现多传感器数据融合
基于选定的融合算法(如EKF),在嵌入式平台(如飞控系统的MCU或DSP)中实现滤波计算,核心流程如下:
(1)惯性导航计算:基于IMU的加速度与角速率数据,通过捷联惯性导航算法(SINS)计算载体的位置、速度与姿态(如通过四元数更新姿态,避免欧拉角的万向锁问题);
(2)EKF预测步:根据惯性导航的状态转移模型,预测下一时刻的状态向量(位置、速度、姿态、IMU漂移)与误差协方差矩阵;
(3)EKF更新步:用同步后的GPS数据计算测量残差,结合GPS的测量噪声矩阵,更新卡尔曼增益,修正预测状态,得到最优估计值;
(4)输出与反馈:将融合后的状态数据(位置、速度、姿态)实时输出至微型SAR的成像处理模块(用于雷达相位补偿)与飞控系统(用于姿态控制)。
5. 误差补偿:进一步降低系统误差
即使经过滤波融合,仍可能存在“未建模误差”(如IMU的温度漂移随环境变化、GPS的多径误差突发),需通过额外的补偿机制优化精度:
(1)温度补偿:在IMU附近安装温度传感器,实时采集环境温度,通过预校准的“温度-零偏”映射表,动态修正IMU的零偏漂移(如温度每升高10℃,零偏增加0.05°/h,需实时减去该增量);
(2)多径补偿:通过“残差阈值检测”识别GPS多径误差——当EKF的测量残差(GPS与IMU预测值的差值)超过预设阈值(如5米)时,降低GPS在融合中的权重(如从0.8降至0.2),减少多径误差对融合结果的影响;
(3)失锁补偿:当GPS失锁时(如连续3个采样周期无有效数据),切换为“纯IMU模式”,并通过“误差增长模型”(如根据IMU零偏稳定性估算累积误差)实时输出误差范围,提醒用户GPS失锁状态,直至信号恢复。
6. 结果验证:确保融合系统的可靠性
融合系统输出的位置、姿态数据需通过“离线验证”与“在线监控”确保可靠性:
(1)离线验证:在已知轨迹的测试场(如操场、机场跑道),用高精度激光测距仪或差分GPS(RTK)记录载体的真实轨迹,与融合系统的输出轨迹对比,计算“位置误差”(如均方根误差RMSE,需≤0.5米,RTK场景≤0.1米)、“姿态误差”(如滚转/俯仰误差≤0.1°,偏航误差≤0.5°);
(2)在线监控:在微型SAR飞行过程中,实时监控融合系统的“协方差矩阵迹”(迹越小,状态估计越可靠)、“GPS残差”(残差越小,GPS数据越有效),当指标异常时(如协方差迹超过阈值),触发告警机制(如向地面站发送告警信息),避免影响雷达成像。
四、微型SAR场景下的核心挑战与优化策略
微型SAR飞行服务的应用场景复杂(如城市、森林、山区),IMU/GPS融合技术面临“GPS失锁、高频振动、多径干扰”等特殊挑战,需针对性优化:
挑战1:GPS长时失锁下的误差控制
在隧道、地下停车场、密集森林等场景,GPS可能出现10秒以上的长时失锁,此时纯IMU的累积误差会快速增大(如10秒内位置误差可达10米以上),导致微型SAR成像模糊。
优化策略:
1. 多传感器辅助融合:在载体上增加视觉传感器(如单目相机、双目相机)或激光雷达(LiDAR),当GPS失锁时,通过视觉里程计(VO)或激光里程计(LO)计算相对位置,与IMU融合(即IMU/GPS/VO多源融合),将失锁时的位置误差控制在1米以内;
2. 误差预补偿:基于历史飞行数据,建立IMU漂移误差的“场景模型”(如不同温度、振动环境下的漂移规律),失锁时通过模型预测漂移误差,提前补偿,减少累积误差。
挑战2:微型载体高频振动导致的IMU噪声增大
微型SAR载体(如多旋翼无人机)的电机旋转、螺旋桨气流会产生高频振动(通常100Hz~1kHz),导致IMU的加速度计与陀螺仪测量噪声增大,甚至出现“振动耦合误差”(如振动导致加速度计输出虚假的线加速度,引发姿态误判)。
优化策略:
1. 硬件减振:在IMU安装位置增加减振材料(如硅胶垫、海绵)或减振结构(如金属弹簧减振器),将振动幅度降低至IMU的“振动耐受范围”(通常≤0.1g,g为重力加速度);
2. 软件滤波:在IMU数据预处理阶段,通过低通滤波器(如巴特沃斯滤波器,截止频率50Hz)或卡尔曼滤波的“噪声自适应调整”(根据振动强度动态增大IMU的噪声协方差,降低振动对融合结果的影响),滤除高频振动噪声。
挑战3:城市多径效应导致的GPS精度骤降
城市中高楼、玻璃幕墙会反射GPS卫星信号,导致GPS模块接收到“直射信号+反射信号”,引发多径效应——测量位置与真实位置的偏差可达10~50米,若直接用于修正IMU,会导致融合结果“跳变”,影响微型SAR的飞行稳定性。
优化策略:
1. 多径检测与权重调整:通过“残差一致性检验”识别多径信号——若GPS测量值与IMU预测值的残差连续多次超过阈值(如3倍GPS噪声标准差),判定为多径干扰,此时降低GPS在融合中的权重(如从0.8降至0.1),减少多径误差的影响;
2. 卫星选择优化:在GPS模块中配置“多径抑制算法”(如Ublox的Multi-path Mitigation技术),优先选择“高仰角卫星”(仰角>30°,受建筑物遮挡与多径影响较小)的信号,提升GPS测量精度。
IMU/GPS融合技术是
微型SAR飞行服务的“导航核心”,通过多传感器数据的互补与协同,解决了单一传感器在复杂场景下的局限性,为微型SAR提供了连续、稳定、高精度的位置与姿态信息。其技术核心在于“误差建模的精准性、数据同步的实时性、滤波算法的适应性”,需结合微型载体的SWaP约束与应用场景的复杂性,进行硬件选型、软件优化与系统验证。
MiniSAR聚焦于微型合成孔径雷达(SAR)制造研发,为用户提供定制化机载SAR、轻型MiniSAR、无人机载MiniSAR、SAR数据采集服务、SAR飞行服务等。如您有相关业务需求,欢迎联系!



 150-110-63408
150-110-63408